

nema42 stepper motor, stepper motor, stepping motor, nema42
nema42 stepper motor, stepper motor, stepping motor,nema42,
nema42, nema42 stepper motor, Stepper nga Motor, Stepping Motor,
NEMA42 Easy Servo Series(NEMA42 Closed Loop series)
Mga Parameter sa Elektriko sa Motor:
| Mode | Anggulo sa lakang | Karon (A) | Pagsukol (Ω±10%) | Inductance (mH±20%) | Pagkupot sa torque (Nm) | Motor nga gitas-on (mm) | Encoder Resolusyon (PPR) | Magamit nga Driver |
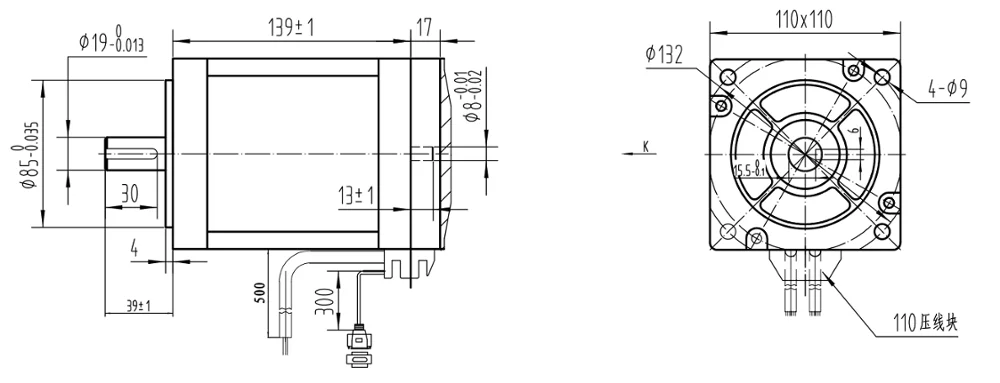
| 110HCE12N-B39 | 1.2° | 4.2 | 1.2 | 13 | 12 | 139 | 1000 | 3HSS2260 |
| 110HCE20N-B39 | 1.2° | 4.2 | 1.88 | 18 | 20 | 221 | 1000 | 3HSS2260 |
Dimensyon sa motor: mm
Torque/Frequency Curve
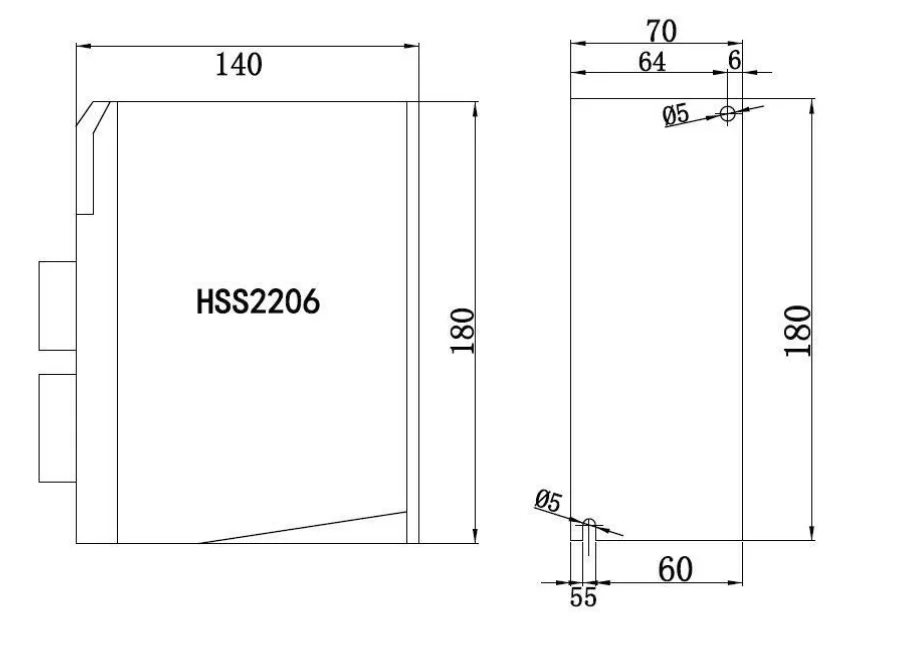
Driver 3HSS2260
Mga bahin
1, 32-bit DSP ug vector closed-loop control technology
2, Kung wala’y pagkawala sa lakang, taas nga katukma sa posisyon
3, Pauswaga ang motor output torque ug katulin sa pagtrabaho
4, Variable karon nga teknolohiya sa pagkontrol, pagpugong sa pagtaas sa temperatura sa motor
5, Ipahiangay sa lainlaing mga kondisyon sa mekanikal nga pagkarga (lakip ang mga low-rigidity pulleys), dili
kinahanglan nga i-adjust ang gain parameter
6, Smooth ug kasaligan nga paglihok, ubos nga vibration, dako nga kalamboan sa pagpadali ug
paghinayhinay
7, Ang abilidad sa zero speed static nga walay vibration
8, Ipahiangay sa 3-phase 86(NEMA34) ug 110(NEMA 42) hybrid servo motor
9, Maximum nga step-pulse frequency 200KHZ
10, Micro nga lakang 400-60000 pulse/rev
11, Sakup sa boltahe AC150-240V
12, Labaw sa kasamtangan, sobra sa boltahe ug labaw sa posisyon nga proteksyon
13, Unom ka digital tube display, sayon nga itakda ang mga parameter ug monitor sa motor nga nagdagan
estado
Pagpili sa Microstep:
| Code | Kahubitan | Sakop | Default nga Bili | Sulti |
| PA0 | Numero sa Bersyon | 501 | Gidili ang Pagbag-o | |
| PA1 | Pagpili sa Control Mode | 0~2 | 0 | |
| PA2 | Pagpili sa Type sa Motor | 0~2 | 0 | |
| PA3 | Power On Display | 0~7 | 0 | |
| PA4 | Kasamtangang Loop Kp | 0~1000 | 200 | Gidili ang Pagbag-o |
| PA5 | Kasamtangang Loop Ki | 0~1000 | 300 | Gidili ang Pagbag-o |
| PA6 | Posisyon Loop Kp | 0~1000 | 300 | |
| PA7 | Pagtakda sa Micro Steps | 400~60000 | 4000 | |
| PA8 | Encoder Resolution(1000) | 4000 | Gidili ang Pagbag-o | |
| PA9 | Encoder Resolution(1000) | 40~30000 | 1000 | |
| PA10 | Pagkupot sa Current | 10~100 | 40 | |
| PA11 | Sirado nga Loop Current | 10~100 | 100 | |
| PA12 | Pagpareserba | |||
| PA13 | Pagpareserba | |||
| PA14 | I-enable ang Level | 0/1 | 0 | |
| PA15 | Level sa Alarm | 0/1 | 0 | |
| PA16 | Pagpili sa Pulse Mode | 0/1 | 0 | |
| PA17 | Pulse Edge | 0/1 | 0 | |
| PA18 | Direksyon sa Pagtuyok sa Motor | 0/1 | 0 | |
| PA19 | JOG Speed | 1~200 | 60 | |
| PA20 | Seksyon sa PEND Mode | 0/1 | 0 | |
| PA21 | Ang lebel sa PEND | 0/1 | 0 |
Dimensyon sa drayber (mm):
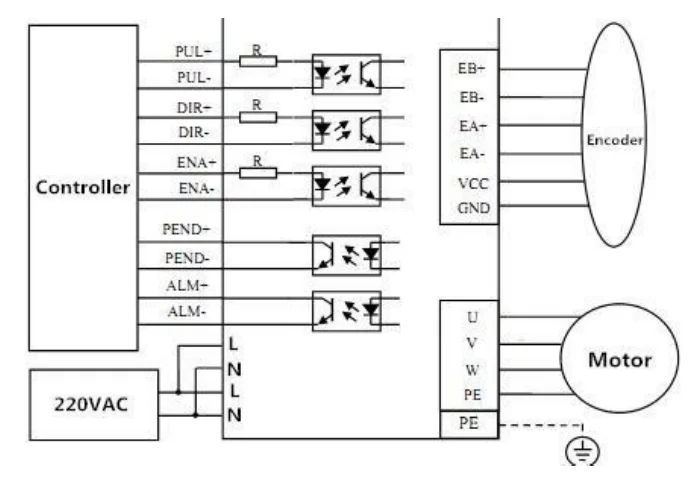
Wiring Diagram:
nema42stepper motor,
stepper motor,
stepping motor,
nema42



,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
